|
|
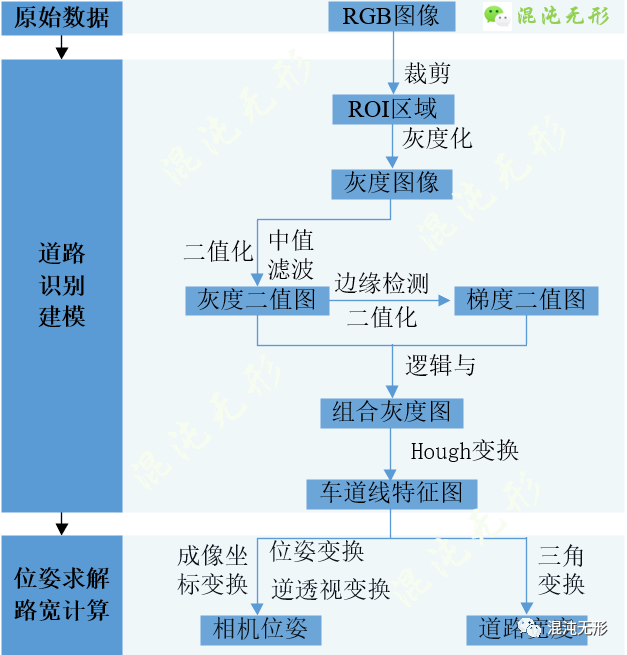
ļp─┐ŽÓÖC╔·│╔Ą─RGBłDŽ±Ż¼ų„ę¬ė├ė┌ūRäe╩ę═ŌĄ└┬Ę▄ćĄ└ŠĆĪŻ╚ńłD 2.3Ż¼į┌╩ę═Ōł÷Š░ųąŻ¼═©▀^Ņü╔½ĪóÄū║╬Ą╚╠žš„ūRäe▄ćĄ└ŠĆŻ¼▓óėŗ╦ŃŽÓÖCū°ś╦ŽĄį┌Ą└┬ĘųąĄ─╬╗ū╦ĪŻ
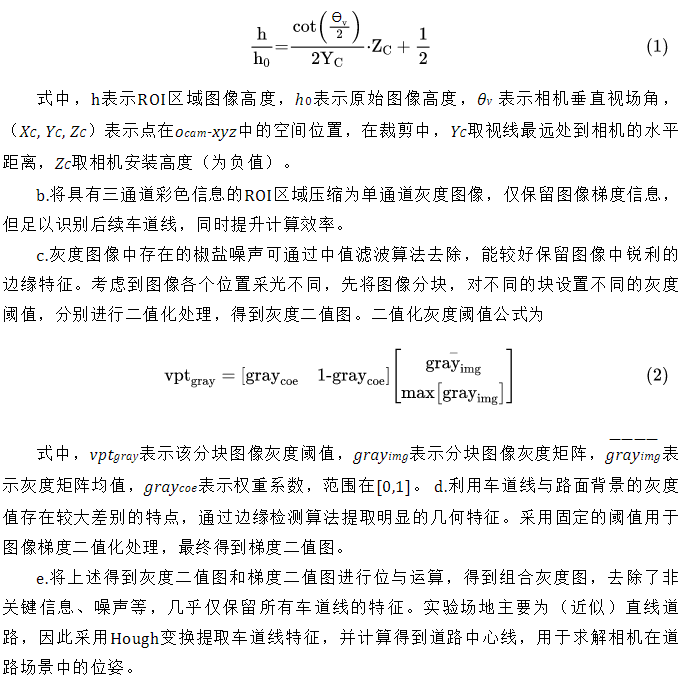
╔ŽłD├Ķ╩÷┴╦╩ę═Ō▄ćĄ└ŠĆ╝░ŽÓÖCū╦æBĄ─Ū¾ĮŌ┴„│╠Ż¼╗∙ė┌▄ćĄ└ŠĆŅü╔½╠žš„╠ß╚Ī▄ćĄ└ŠĆŻ¼Š▀¾w╚ńŽ┬Ż║ a.įŁ╩╝RGBłDŽ±▌^┤¾Ż¼Č°▄ćĄ└ŠĆų„ę¬╝»ųąė┌łDŽ±Ž┬░ļ▓┐ĘųŻ¼ę“┤╦┐╔▓├╝¶łDŽ±ęį┴¶╚ĪĻPµI▓┐ĘųŻ¼═¼Ģr£pąĪėŗ╦Ń┴┐ĪóĮĄĄ═įļ┬ĢĪŻĮž╚ĪłDŽ±Ģ■üG╩¦▓┐Ęųą┼ŽóŻ¼×ķ▒Ż│ųÖCŲ„╚╦ėąūŃē“Ą─ęĢę░Ż¼ąĶī”Įž╚Ī│▀┤ńėŗ╦ŃŻ¼╣½╩Į×ķ
|
| ░µÖÓ╦∙ėą © ▒▒Š®äōØ╔ųŪ╗█ÖCŲ„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |