|
|
į┌ī”(du©¼)╚½Ž“▌åęŲäė(d©░ng)ŲĮ┼_(t©ói)▀\(y©┤n)äė(d©░ng)ęÄ(gu©®)┬╔Ęų╬÷ų«Ū░ąĶę¬ū÷ā╔éĆ(g©©)╗∙▒Š╝┘įO(sh©©)Ż║ó┘╚½Ž“▌åŲĮ┼_(t©ói)▀\(y©┤n)äė(d©░ng)▀^(gu©░)│╠ųąŻ¼▌åūė▓╗Ģ■(hu©¼)æę┐šČ°░l(f©Ī)╔·┐š▐D(zhu©Żn)¼F(xi©żn)Ž¾Ż╗ó┌╚½Ž“▌åŲĮ┼_(t©ói)┘|(zh©¼)┴┐Ęų▓╝Š∙ä“Ż¼Ūę┘|(zh©¼)ą─╬╗ų├į┌³c(di©Żn)CENTER╠ÄŻ¼ęį▒ŻūC╚²Ż©╗“╦─Ż®éĆ(g©©)▌åūėį┌Ąž├µĮėė|³c(di©Żn)╩▄ĄĮĄ─ų¦ō╬┴”ŽÓ═¼Ż¼┤_▒Ż╚²Ż©╗“╦─Ż®éĆ(g©©)Ą╚▐D(zhu©Żn)╦┘Ą─▌åūė╩▄ĄĮĄž├µū„ė├Ą──”▓┴┴”┤¾ąĪŽÓ═¼ĪŻ ╗∙ė┌╔Ž╩÷╝┘įO(sh©©)Śl╝■Ż¼▓ó░┤ššę╗Č©ęÄ(gu©®)┬╔┬ō(li©ón)║Ž┐žųŲ╚²éĆ(g©©)▌åūė▐D(zhu©Żn)äė(d©░ng)Ż¼«a(ch©Żn)╔·▓╗═¼ĘĮŽ“Ą──”▓┴┴”Ż¼▒Ń┐╔īŹ(sh©¬)¼F(xi©żn)╚½Ž“ŲĮ┼_(t©ói)ęį╚╬ęŌ╦┘Č╚čžų°╚╬ęŌĘĮŽ“▀\(y©┤n)äė(d©░ng)ĪŻ
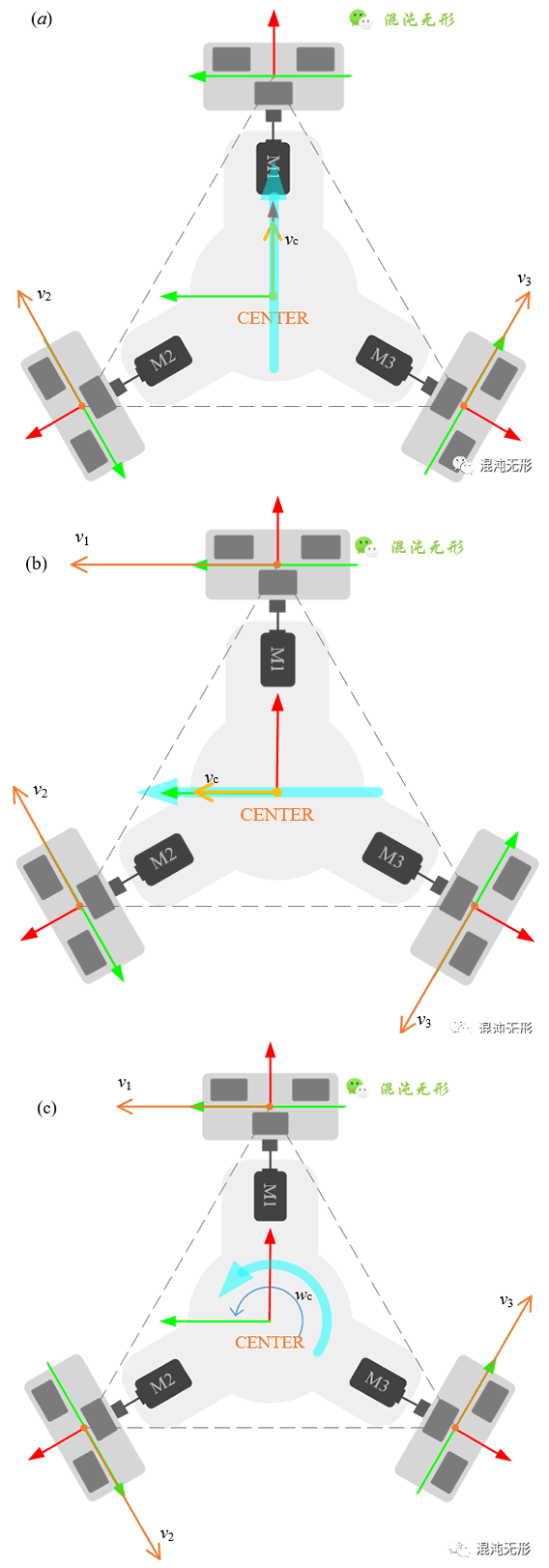
▀\(y©┤n)äė(d©░ng)─Ż╩Į╩ŠęŌłD. Ż©aŻ®Ū░Ž“▀\(y©┤n)äė(d©░ng)Ż¼Ż©bŻ®ū¾Ž“▀\(y©┤n)äė(d©░ng)Ż¼Ż©cŻ®─µĢr(sh©¬)ßśūįą²▀\(y©┤n)äė(d©░ng). ╦{(l©ón)╔½╝²Ņ^▒Ē╩Š╚½Ž“ŲĮ┼_(t©ói)Ą─▀\(y©┤n)äė(d©░ng)ĘĮŽ“Ż¼ķ┘╔½╝²Ņ^▒Ē╩Š├┐éĆ(g©©)╚½Ž“▌åĄ─▀\(y©┤n)äė(d©░ng)╦┘Č╚ĘĮŽ“Ż¼╝²Ņ^┤¾ąĪ▒Ē╩Š╦┘Č╚┤¾ąĪ.
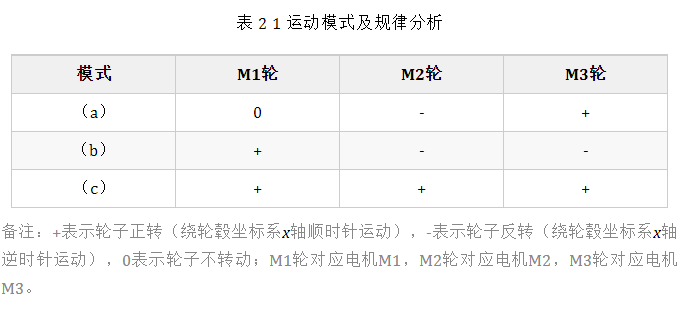
│╩¼F(xi©żn)┴╦¹£▌åŲĮ┼_(t©ói)Ą─3ĘN│ŻęÄ(gu©®)Ą─▀\(y©┤n)äė(d©░ng)─Ż╩ĮĪŻĮY(ji©”)║Ž▒Ē 2 1Ą─ą┼Žóū÷▀M(j©¼n)ę╗▓ĮĘų╬÷Ż║ Ū░Ž“ų▒ŠĆ▀\(y©┤n)äė(d©░ng)Ż║ęįłD 2.2Ż©aŻ®×ķ└²Ż¼M1ļŖÖC(j©®)ņoų╣Ż¼M2▌å─µĢr(sh©¬)ßś▀\(y©┤n)äė(d©░ng)Ż¼M3▌åĒśĢr(sh©¬)ßś▀\(y©┤n)äė(d©░ng)Ż¼ŪęM2║═M3▌å▀\(y©┤n)äė(d©░ng)╦┘Č╚┤¾ąĪŽÓ═¼Ż¼ M2▌å║═M3▌åĄ─╦┘Č╚ĘĮŽ“ę▓╩ŪŲõņo─”▓┴┴”ĘĮŽ“Ż¼─”▓┴┴”┤¾ąĪŽÓĄ╚Ż¼ĘĮŽ“ĻP(gu©Īn)ė┌╚½Ž“▌åŲĮ┼_(t©ói)CENTERū°ś╦(bi©Īo)ŽĄĄ─x▌Sī”(du©¼)ĘQĪŻę“┤╦Ż¼M2▌å║═M3▌åĄ─ņo─”▓┴┴”į┌CENTERū°ś╦(bi©Īo)ŽĄĄ─y▌S╔ŽĄ─═Čė░Ęų┴┐┤¾ąĪŽÓĄ╚Ż¼ĘĮŽ“ŽÓĘ┤Ż¼ätŽÓ╗źĄųŽ¹Ż╗Č°M2▌å║═M3▌åĄ─ņo─”▓┴┴”į┌CENTERū°ś╦(bi©Īo)ŽĄĄ─x▌S╔ŽĄ─═Čė░Ęų┴┐┤¾ąĪŽÓ═¼Ż¼ĘĮŽ“ŽÓ═¼Ż¼ätŽÓ╗ź»B╝ėŻ¼Ūę┼cM1▌åĄ─▌ü?zh©żn)ėØLäė(d©░ng)ĘĮŽ“ę╗ų┬Ż©▓╗Ģ■(hu©¼)«a(ch©Żn)╔·ņo─”▓┴ūĶ┴”Ż®Ż¼ät┐╔“ī(q©▒)äė(d©░ng)╚½Ž“ŲĮ┼_(t©ói)Ū░Ž“▀\(y©┤n)äė(d©░ng)ĪŻM2▌å║═M3▌åĘ┤Ž“▐D(zhu©Żn)äė(d©░ng)Ż¼ät┐╔“ī(q©▒)äė(d©░ng)╚½Ž“ŲĮ┼_(t©ói)║¾Ž“▀\(y©┤n)äė(d©░ng)ĪŻ ū¾Ž“ų▒ŠĆ▀\(y©┤n)äė(d©░ng)Ż║ęįłD 2.2Ż©bŻ®×ķ└²Ż¼ąĶę¬┐žųŲ╚²éĆ(g©©)╚½Ž“▌å═¼Ģr(sh©¬)░┤ššę╗Č©╦┘Č╚▀\(y©┤n)äė(d©░ng)ĪŻ▀@└’ų╗Č©ąįĘų╬÷ĻP(gu©Īn)ŽĄŻ¼Å─łD 2.1┐╔ęį┐┤│÷Ż¼ė╔ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)╚½Ž“▌å▐D(zhu©Żn)äė(d©░ng)«a(ch©Żn)╔·Ą─╦┘Č╚┐é╩Ūčžų°▌å▌×ÅĮŽ“Ż©╝┤łAABCĄ─ŪąŠĆĘĮŽ“Ż®Ż¼ų╗╩ŪZĮKīŹ(sh©¬)ļH║Ž│╔Ą─▀\(y©┤n)äė(d©░ng)╦┘Č╚Ģ■(hu©¼)ę“?y©żn)ķ╦┘Č╚»B╝ėĄ─ĻP(gu©Īn)ŽĄČ°░l(f©Ī)╔·ūā╗»ĪŻ Å─łD 2.2Ż©bŻ®ųą┐┤│÷Ż¼M1▌åš²▐D(zhu©Żn)Ż¼M2▌åĘ┤▐D(zhu©Żn)Ż¼M3▌åĘ┤▐D(zhu©Żn)Ż¼ī”(du©¼)æ¬(y©®ng)ų°M2▌å║═M3▌å╦┘Č╚į┌CENTERū°ś╦(bi©Īo)ŽĄĄ─x▌S╔ŽĄ─═Čė░Ęų┴┐┤¾ąĪŽÓĄ╚Ż¼ĘĮŽ“ŽÓĘ┤Ż¼ätŽÓ╗źĄųŽ¹Ż╗Č°M2▌å║═M3▌å╦┘Č╚į┌CENTERū°ś╦(bi©Īo)ŽĄĄ─y▌S╔ŽĄ─═Čė░Ęų┴┐┤¾ąĪŽÓ═¼Ż¼ĘĮŽ“ŽÓ═¼Ż¼ätŽÓ╗ź»B╝ėŻ¼Ūę»B╝ė║¾Ą─ĘĮŽ“┼cM1▌å╦┘Č╚ĘĮŽ“ę╗ų┬Ż¼ą╬│╔▀M(j©¼n)ę╗▓Į»B╝ėĪŻę“┤╦Ż¼╚¶╚²éĆ(g©©)▌åūėĘ┤Ž“▐D(zhu©Żn)äė(d©░ng)Č°║Ž│╔Ą─▀\(y©┤n)äė(d©░ng)×ķėꎓų▒ŠĆ▀\(y©┤n)äė(d©░ng)ĪŻ ▀@└’ąĶę¬ūóęŌĄ─╩ŪŻ║▀ĆąĶꬥųŽ¹Ą¶ą²▐D(zhu©Żn)▀\(y©┤n)äė(d©░ng)ĪŻM2▌å║═M3▌å«a(ch©Żn)╔·Ą─╦┘Č╚ėą┤┘╩╣╚½Ž“▌åŲĮ┼_(t©ói)└@CENTERū°ś╦(bi©Īo)ŽĄz(m©¼)▌SĒśĢr(sh©¬)ßś?l©©)ĮŽ“▐D(zhu©Żn)äė(d©░ng)Ą─┌ģä▌(sh©¼)Ż¼Č°M1▌åät┤┘╩╣╚½Ž“▌åŲĮ┼_(t©ói)─µĢr(sh©¬)ßś▐D(zhu©Żn)äė(d©░ng)Ż¼ę“┤╦ąĶ꬚{(di©żo)╣Ø(ji©”)╚²éĆ(g©©)╚½Ž“▌åĄ─▐D(zhu©Żn)╦┘┤¾ąĪŻ¼īóą²▐D(zhu©Żn)▀\(y©┤n)äė(d©░ng)ŲĮ║ŌĄ¶ĪŻ ─µĢr(sh©¬)ßśūįą²▀\(y©┤n)äė(d©░ng)Ż║ęįłD 2.2Ż©cŻ®×ķ└²Ż¼╦∙ėą╚½Ž“▌åŠ∙š²▐D(zhu©Żn)Ż¼╝┤╦∙ėą╚½Ž“▌åĄ─╦┘Č╚ĘĮŽ“Š∙čžų°łAABCĄ─ŪąŠĆĘĮŽ“Ż¼Ūę│»Ž“─µĢr(sh©¬)ßś?l©©)ĮŽ“ĪŻ╚¶īó╚²éĆ(g©©)╚½Ž“▌åĄ─╦┘Č╚╩Ė┴┐[v1 v2 v3]Ą─Ų╩╝³c(di©Żn)ŲĮęŲų┴³c(di©Żn)CENTERŻ¼─Ū├┤╚²éĆ(g©©)╦┘Č╚╩Ė┴┐Ą─ŖAĮŪ×ķ120Č╚Ż¼Ūę╦┘Č╚┤¾ąĪŽÓĄ╚Ż¼ę“┤╦╚²éĆ(g©©)╦┘Č╚╩Ė┴┐║Ž│╔×ķ┴ŃŽ“┴┐Ż¼ę“┤╦╚½Ž“▌åŲĮ┼_(t©ói)▓╗Ģ■(hu©¼)ęŲäė(d©░ng)ĪŻ Ą½╩ŪŻ¼╦┘Č╚╩Ė┴┐[v1 v2 v3]Ą─šµīŹ(sh©¬)Ų╩╝³c(di©Żn)Ęų▓╝į┌łAABC╔ŽŻ¼ŪęĘĮŽ“Š∙×ķ─µĢr(sh©¬)ßśŻ¼▒Ń┐╔ŪĪ║├»B╝ė║Ž│╔┤┘╩╣╚½Ž“▌åŲĮ┼_(t©ói)─µĢr(sh©¬)ßśūįą²ĪŻ╚¶╦∙ėą╚½Ž“▌åĄ╚╦┘Ę┤▐D(zhu©Żn)Ż¼ät╚½Ž“▌åŲĮ┼_(t©ói)ĒśĢr(sh©¬)ßśūįą²ĪŻŻ©ę▓┐╔ęį─µŽ“╦╝ŠS└ĒĮŌŻ║ę╗éĆ(g©©)łA▒P└@ų°łAą─ūįą²Ż¼łAų▄╔ŽĄ─╦∙ėą³c(di©Żn)[▒╗│ķŽ¾×ķ╚½Ž“▌å┼cĄž├µĄ─Įėė|³c(di©Żn)]Ą─╦┘Č╚┤¾ąĪŽÓĄ╚Ż¼ĘĮŽ“Š∙čžų°łAŪąŠĆŻ¼ŪęŠ∙×ķĒśĢr(sh©¬)ßś╗“─µĢr(sh©¬)ßśŻ® ╔Ž╩÷āHī”(du©¼)╚²ĘN╠ž╩ŌĄ─▀\(y©┤n)äė(d©░ng)─Ż╩Įū÷┴╦Č©ąįĘų╬÷Ż¼╝╚╚╗╩Ū╚½Ž“▌åŲĮ┼_(t©ói)Ż¼šf(shu©Ł)├„įōŲĮ┼_(t©ói)┐╔ęįčžų°╚╬ęŌĘĮŽ“Ż¼ęį╚╬ęŌ╦┘Č╚▀\(y©┤n)äė(d©░ng)Ż¼╚¶ąĶę¬┴┐╗»Ęų╬÷╚²éĆ(g©©)╚½Ž“▌å▐D(zhu©Żn)╦┘┼cęŲäė(d©░ng)ŲĮ┼_(t©ói)ųąą─³c(di©Żn)▀\(y©┤n)äė(d©░ng)╦┘Č╚Ą─ĻP(gu©Īn)ŽĄŻ¼─ŪŠ═ę¬Į©┴ó▀\(y©┤n)äė(d©░ng)īW(xu©”)─Żą═Ż¼ęįīŹ(sh©¬)¼F(xi©żn)╚½Ž“ęŲäė(d©░ng)ŲĮ┼_(t©ói)▀\(y©┤n)äė(d©░ng)Ą─£╩(zh©│n)┤_┐žųŲĪŻ Ż©ūóŻ║ę▓┐╔ęįÅ─├┐éĆ(g©©)╚½Ž“▌å╩▄┴”ŪķørĘų╬÷Ą─ĮŪČ╚╚ļ╩ųŻ¼Ųõ╦╝┬Ę║═ĘĮĘ©┐╔ęįģó┐╝ĪČ¹£┐╦╝{─Ę▌å▀\(y©┤n)äė(d©░ng)╠žąįĘų╬÷ĪĘĪóĪČ¹£┐╦╝{─Ę▌å╚½Ž“ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦▀\(y©┤n)äė(d©░ng)─Żą═╝░æ¬(y©®ng)ė├Ęų╬÷ĪĘŻ®
|
| ░µÖÓ(qu©ón)╦∙ėą © ▒▒Š®äō(chu©żng)Ø╔ųŪ╗█ÖC(j©®)Ų„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢(h©żo)-2 |