|
|
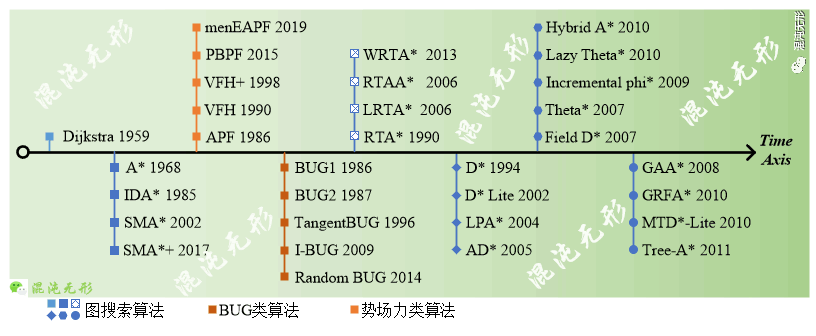
▀\äėęÄäØę╗ų▒╩ŪÖCŲ„╚╦Lė“ĘŪ│ŻĮøĄõĄ─蹊┐¤ß³cų«ę╗Ż¼ųTČÓīWš▀║═蹊┐ÖCśŗßśī”▀\äėęÄäØųąĄ─┐ŲīWå¢Ņ}▀Mąą┴╦╔Ņ╚ļ蹊┐ĪŻ▀\äėęÄäØ╦ŃĘ©ßśī”▓╗═¼Ą─æ¬ė├ł÷Š░ėąų°▓╗═¼Ą─蹊┐é╚ųž³cŻ¼▒╚╚ńė╬æ“Lė“Ż¼ė╬æ“╚╬äšÅ─A³c▀\äėĄĮB³cĄ─▀\äėęÄäØąĶŪ¾╩Ūėŗ╦ŃŽ¹║─ā╚┤µąĪĪóėŗ╦ŃīŹĢrąį║├Ż¼┬ĘÅĮ┘|┴┐ę¬Ū¾┐╔─▄ąĶę¬╠½GŻ╗Č°į┌╚½ŠųęÄäØLė“Ż¼╚ń░┘Č╚ĄžłDĄ╚æ¬ė├Ż¼äté╚ųžčąŠ┐╚ń║╬┐ņ╦┘šęĄĮę╗ŚlÅ─Ų³cĄĮĮK³cĄ─┐╔ąąĄ─┬ĘÅĮŻ¼▓ó▓╗Ģ■ĻPūóš¹Śl┬ĘÅĮĄ─╝Ü╣Øå¢Ņ}Ż╗Č°į┌ÖCŲ„╚╦▀\äė▀^│╠ųąŻ¼Š═ąĶę¬é╚ųžĻPūó▄ē█EŪ·ŠĆĄ─┘|┴┐ĪŻ łDęÄäØ╦ŃĘ© łDęÄäØ╦ŃĘ©ČÓöĄīóŁhŠ│─Żą═ļx╔ó╗»▒Ē▀_Ż¼╚ń¢┼Ė±łDĄ╚Ż¼Ųõļx╔ó╣سc├Ķ╩÷ŽÓæ¬ĀŅæBŻ¼Į©┴ó╣سcķg┬ōŽĄŻ¼▓óŪ¾ĮŌZā×┬ĘÅĮĪŻ łDęÄäØ╦ŃĘ©Ė∙ō■┬ĘÅĮ╔·│╔ĘĮ╩ĮĄ─▓╗═¼Ęų×ķ╚²ŅÉŻ¼ŲõųąęįłD╦č╦„╦ŃĘ©×ķų„Ż¼ęį╝░BUG╦ŃĘ©║═ä▌ł÷┴”╦ŃĘ©ĪŻ
|
| ░µÖÓ╦∙ėą © ▒▒Š®äōØ╔ųŪ╗█ÖCŲ„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |